CSAPP6

存储技术

随机访问存储器(RAM)
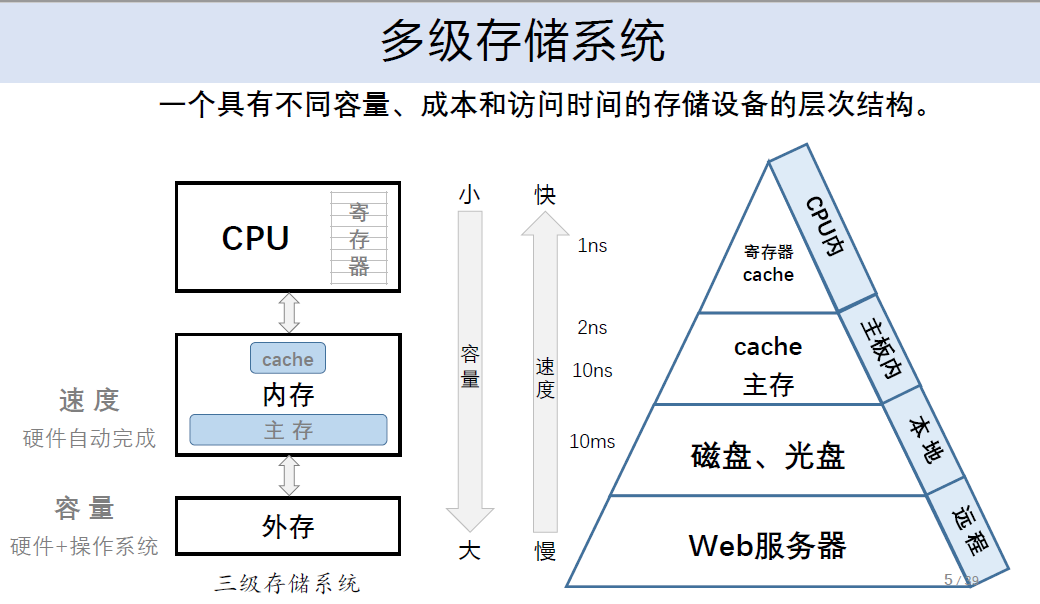
SRAM(静态随机存取存储器):使用触发器存储数据,速度快但容量较小且成本高,不需要刷新。
一般用作 cache
存储元由6个晶体管组成 只要有电,信息一直保存 对电器干扰不敏感 比DRAM更快,也更贵
DRAM(动态随机存取存储器):使用电容器存储数据,容量大但速度较慢,需要定期刷新。
一般用作主存
特点如下:
存储元由1个电容+1个晶体管组成 每隔一段时间必须刷新一次 对电器干扰敏感 比SRAM慢,但便宜
更具体的内部实现参考数字逻辑
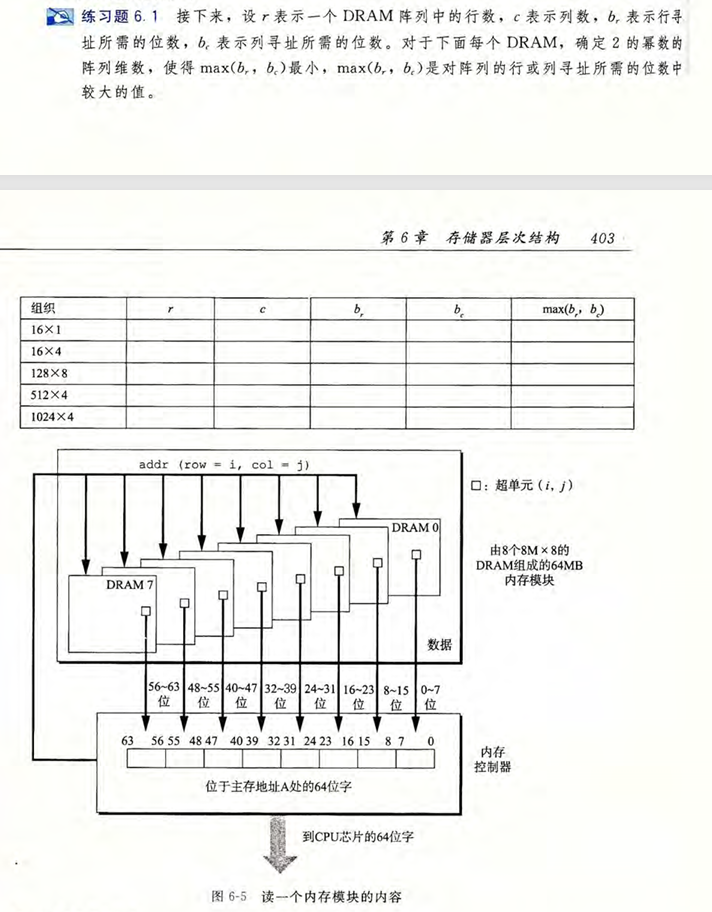
- 参数含义:
- 组织 (\(N \times M\)):表示 DRAM 中有 \(N\) 个超单元(supercells),每个超单元包含 \(M\) 位(bits)。
- \(r\):DRAM 阵列的行数。
- \(c\):DRAM 阵列的列数。
- \(b_r\):行寻址所需的位数,即 \(b_r = \log_2 r\)。
- \(b_c\):列寻址所需的位数,即 \(b_c = \log_2 c\)。
- 约束条件:
- 总超单元数 \(N = r \times c\)。
- \(r\) 和 \(c\) 必须是 2 的幂。
- 目标是使 \(\max(b_r, b_c)\) 最小。这意味着 \(r\) 和 \(c\) 应该尽可能接近。
| 组织 | \(r\) | \(c\) | \(b_r\) | \(b_c\) | \(\max(b_r, b_c)\) |
|---|---|---|---|---|---|
| \(16 \times 1\) | 4 | 4 | 2 | 2 | 2 |
| \(16 \times 4\) | 4 | 4 | 2 | 2 | 2 |
| \(128 \times 8\) | 16 | 8 | 4 | 3 | 4 |
| \(512 \times 4\) | 32 | 16 | 5 | 4 | 5 |
| \(1024 \times 4\) | 32 | 32 | 5 | 5 | 5 |
- \(16 \times 1\): \(N=16=2^4\)。\(b_r+b_c=4\)。取 \(b_r=2, b_c=2\),则 \(r=2^2=4, c=2^2=4\)。\(\max(2,2)=2\)。
- \(16 \times 4\): \(N=16=2^4\)(超单元数依然是 16)。同上,\(b_r=2, b_c=2, r=4, c=4, \max=2\)。
- \(128 \times 8\): \(N=128=2^7\)。\(b_r+b_c=7\)。取 \(b_r=4, b_c=3\),则 \(r=2^4=16, c=2^3=8\)。\(\max(4,3)=4\)。(若取 \(b_r=3, b_c=4\) 结果一致)。
- \(512 \times 4\): \(N=512=2^9\)。\(b_r+b_c=9\)。取 \(b_r=5, b_c=4\),则 \(r=2^5=32, c=2^4=16\)。\(\max(5,4)=5\)。
- \(1024 \times 4\): \(N=1024=2^{10}\)。\(b_r+b_c=10\)。取 \(b_r=5, b_c=5\),则 \(r=2^5=32, c=2^5=32\)。\(\max(5,5)=5\)。
磁盘
存储
磁盘由盘片构成,盘片上有磁道,磁道上有扇区,构造如图所示
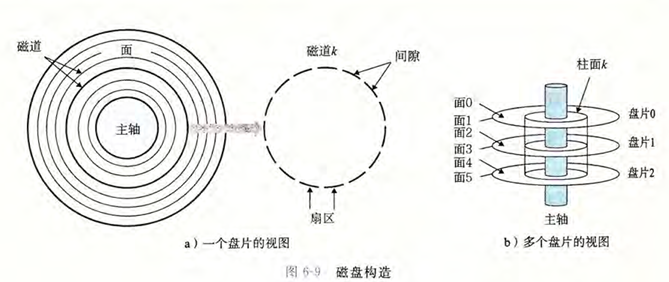
一个磁盘上可以记录的最大位数称为它的最大容量,或者简称为容量。磁盘容量是由以下技术因素决定的:
- 记录密度:每英寸磁道上能记录的位数,通常以每英寸位数(bpi,bits per inch)表示。
- 磁道密度:从盘片中心到边缘每英寸能容纳的磁道数,通常以每英寸磁道数(tpi,tracks per inch)表示。
- 面密度:每个盘片的记录面数。
现代大容量 磁盘使用一种称为多区记录
此技术中,柱面的集合被分割为不相交的子集,称为记录区(recording zones),每个取包含连续的柱面,一个区中每个柱面中的每条磁道都有相同数量的扇区
下面公式给出了一个磁盘的容量 \[ 磁盘容量=\frac{字节数}{扇区}\times \frac{平均扇区数}{磁道} \times \frac{磁道数}{表面} \times \frac{表面数}{盘片} \times \frac{盘片数}{磁盘} \] 假设我们有一个磁盘,有 \(5\) 个盘面,每个扇区 \(512\) 字节,每个面 \(20000\) 条磁道,每条磁道平均 \(300\) 个扇区
那么这个磁盘的容量就是 \(5\times 512 \times 20000 \times 2 \times 300 = 30.72GB\)
需要注意的是,磁盘的容量通常以十进制计量单位表示(1GB = \(10^9\) 字节),而计算机内存通常以二进制计量单位表示(1GiB = \(2^{30}\) 字节)
读写
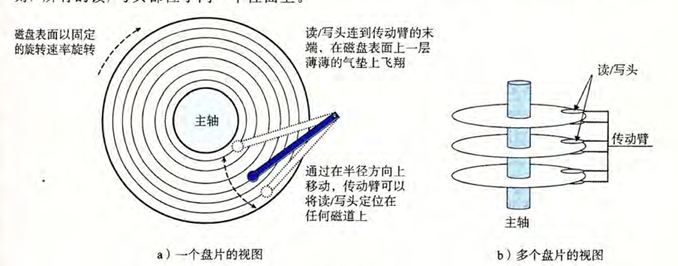
通过沿着半径轴前后移动这个传动臂,驱动器可以将读/写头定位在盘面上的任何磁道上。这样的机械运动称为寻道(seek)
当读/写头到达目标磁道后,盘片继续旋转,直到目标扇区转到读/写头下方为止。
寻道时间:找到目标磁道所需的时间\(T_{avg\_seek}\)
旋转时间:从目标磁道开始旋转到目标扇区到达读/写头下方所需的时间
这个步骤的性能依赖于磁盘的转速,通常以每分钟转数(RPM,revolutions per minute)表示。转速越高,平均旋转延迟越低,从而提高了读写性能。
平均旋转时间 \(T_{avg\_rotation}\) 是最大旋转延迟 \(T_{max\_rotation}\) 的一半:
其中最大旋转延迟 \(T_{max\_rotation}\) 可以通过以下公式计算: \[ T_{max\_rotation}=\frac{1}{RPM} s \times 60 \] 传送时间:读取或写入数据所需的时间
平均传送时间 \(T_{avg\_transfer}\) 可以通过以下公式计算: \[ T_{avg\_transfer}=\frac{1}{RPM}s\times 60 \times \frac{1}{平均扇区数/磁道} \] 例如,参考一个如下参数的磁盘:
- 转速:7200 RPM
- 平均扇区数/磁道:300
- \(T_{avg\_seek}=9ms\)
那么:
- \(T_{max\_rotation}=\frac{1}{7200}s\times 60=8.33ms\)
- \(T_{avg\_rotation}=\frac{8.33ms}{2}=4.17ms\)
- \(T_{avg\_transfer}=\frac{1}{7200}s\times 60 \times \frac{1}{300}=0.0278ms\)
整个访问时间就是
\(T_{access}=T_{avg\_seek}+T_{avg\_rotation}+T_{avg\_transfer}=9ms+4.17ms+0.0278ms=13.1978ms\)
最大访问时间就是
\(T_{max\_access}=T_{avg\_seek}+T_{max\_rotation}+T_{avg\_transfer}=9ms+8.33ms+0.0278ms=17.3578ms\)
SSD
SSD(固态硬盘)使用闪存技术存储数据,没有机械运动部件,因此读写速度更快,抗震性能更好,但成本较高。
SSD 读比写快
局部性
一个编写良好的计算机程序常常具有良好的局部性,也就是,它们倾向于引用邻近于其他最近引用过的数据项的数据项,或者最近引用过的数据项本身
一般而言,有良好局部性的程序比局部性差的程序运行得更快
时间局部性
被引用过一次的内存位置很可能在不远的将来再被多次引用。核心思想:“最近用过的,待会可能还要用”
代码体现:循环中的变量、累加器
空间局部性
如果一个内存位置被引用了,那么程序很可能在不远的将来引用其附近(地址相邻)的内存位置。核心思想:“附近用过的,待会可能用附近的”
代码体现:按顺序访问数组元素(步长为 1 的访问)
考虑一个简单的求和函数
1 | int sum_array(int v[N]) { |
- 时间局部性:极好。变量
sum和i在每次循环迭代中都被访问,它们被重复使用。 - 空间局部性:极好。数组
v是连续存储的,程序按照v[0], v[1], v[2]...的顺序访问(步长为 1),这契合了空间局部性。
但是在二位数组中
1 | // 内存顺序:A[0][0], A[0][1], A[0][2] ... A[1][0], A[1][1]... |
这种写法空间局部性非常好,CPU 预取(Prefetch)数据时命中率极高
1 | // 每次循环跳转的地址很大(跳过一整行) |
空间局部性极差。每次执行 i++,程序都要跳过一整行数据去取下一个元素。如果数组很大,会导致缓存频繁失效(Cache Miss),程序运行速度可能比行优先慢数倍
高速缓存 Cache
高速缓存(Cache)是一种小容量、速度极快的存储器,位于处理器和主存之间,用于临时存储频繁访问的数据和指令,以提高系统整体性能。
如图展示了存储器层次结构中缓存的一般性概念,第 \(k+1\) 层的存储器被分成连续的数据对象组块,称为 块
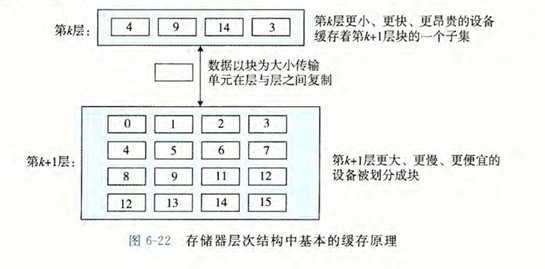
数据总是以块大小为传送单元(transfer unit)在第\(k\)层和第\(k+1\)层之间来回复制的
一般而言,层次结构中较低层(离CPU较远)的设备的访问时间较长,因此为了补偿这些较长的访问时间,倾向于 使用较大的块
缓存命中
当处理器请求的数据已经存在于缓存中时,称为缓存命中(cache hit)。在这种情况下,数据可以直接从缓存中读取,访问速度非常快。
缓存不命中
当处理器请求的数据不在缓存中时,称为缓存不命中(cache miss)。此时,系统必须从较慢的主存中加载数据到缓存,然后再提供给处理器,这会导致较长的延迟。
缓存不命中分为三类
如果第 \(k\) 层的缓存时空的,那么对任何数据对象访问都会不命中,空的缓存称为 冷缓存(cold cache) 或,此类不命中称为 冷不命中(cold miss) 或 强制不命中(compulsory miss)
如果缓存使用了某种映射策略(如直接映射或组相联映射),那么不同的数据块可能会映射到缓存中的同一位置,这可能导致频繁的替换和不命中,此类不命中称为 冲突不命中(conflict miss)
如果缓存容量不足以容纳所有正在使用的数据块,那么当新的数据块被加载时,可能会替换掉仍然需要的数据块,此类不命中称为 容量不命中(capacity miss)
高速缓存处理器
考虑这样一个计算机系统,其中每个存储器地址有 \(m\) 位,形成一个地址空间,包含 \(2^m\) 个字节的存储器
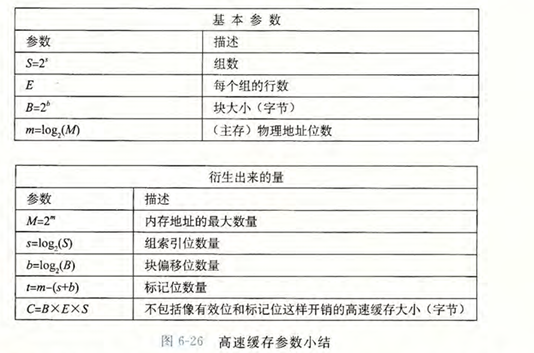
这样的机器的高速缓存被组织成一个有 \(S=2^s\) 个高速缓存组的数组,每个组包含 \(E\) 个高速缓存行,每个行是一个包含 \(B=2^b\) 个字节的数据块
在每个数据块中,一个有效位指明该行是否包含有效数据,还有\(t=m-(b+s)\) 个标记为。唯一地表示存储在这个高速缓存行中的块
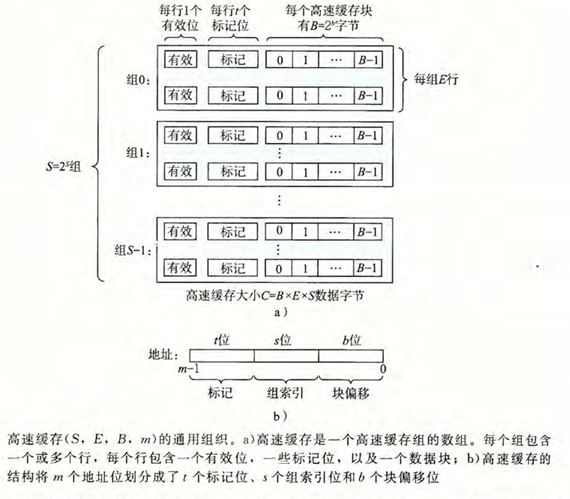
一般而言,这样的高速缓存结构可以用元组 \((S, E, B, m)\) 来表示,高速缓存的总容量 \(C\) 可以通过以下公式计算:
\(C = S \times E \times B \text{ 字节}\)
当一条加载指令指示CPU从主存地址A中读一个字时,CPU首先检查高速缓存中是否存在包含地址A的块。如果存在(缓存命中),CPU就可以直接从高速缓存中读取数据。如果不存在(缓存不命中),则需要从主存中加载包含地址A的块到高速缓存中,然后再从高速缓存中读取数据
参数总结如下
练习 6.9
| 高速缓存 | \(m\) | \(C\) | \(B\) | \(E\) | \(S\) | \(t\) | \(s\) | \(b\) |
|---|---|---|---|---|---|---|---|---|
| 1. | 32 | 1024 | 4 | 1 | 256 | 22 | 8 | 2 |
| 2. | 32 | 1024 | 8 | 4 | 32 | 24 | 5 | 3 |
| 3. | 32 | 1024 | 32 | 32 | 1 | 27 | 0 | 5 |
直接映射高速缓存
高速缓存判断一个请求是否命中,分为三步:
- 组选择
- 行匹配
- 字抽取
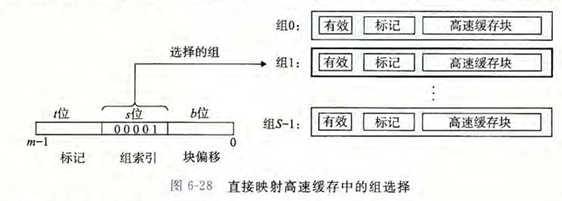
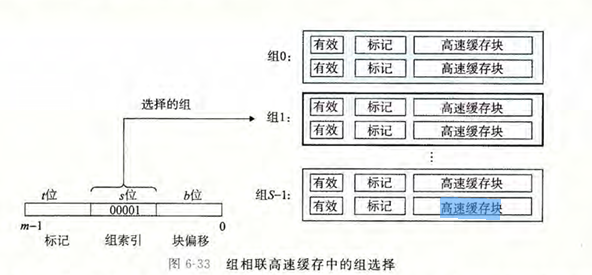
组选择
组选择使用地址的 \(s\) 位组索引字段来选择高速缓存中的一个组。组索引字段位于地址的中间部分,介于标记字段和块偏移字段之间
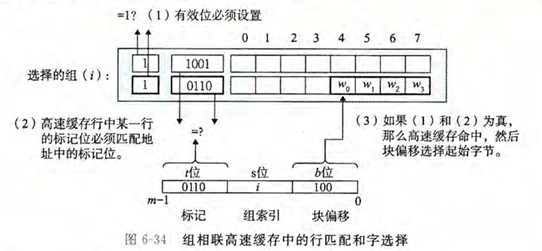
行匹配
上一步中已经选中了一个组,接下来需要在该组中的 \(E\) 个行中查找与地址的标记字段匹配的行。如果找到匹配的行,并且该行的有效位被设置为 1,则表示缓存命中;否则,表示缓存不命中
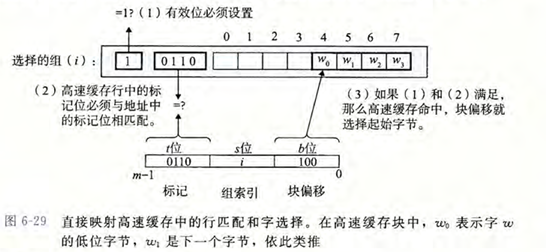
字抽取
一旦找到匹配的行,接下来需要从该行的数据块中提取所需的字。块偏移字段用于确定数据块中的具体字位置
行替换
当发生缓存不命中时,需要将主存中的数据块加载到缓存中。如果所选组中的所有行都已被占用(即有效位均为 1),则需要选择一个行进行替换。
一般而言,如果组中都是有效高 速缓存行了,那么必须要驱逐出一个现存的行。对于直接映射高速缓存来说,每个组只包 有一行,替换策略非常简单:用新取出的行替换当前的行。
当程序访问大小为 2 的幂的数组时,直接映射高速缓存中通常会发生冲突不命中。例如,考虑一个计算两个向量点积的函数
1 | float dot_product(float x[8], float y[8]) { |
这个函数的空间局部性很好,因为它按顺序访问数组 x 和 y 的元素。然而,如果高速缓存的大小为 16 字节,并且每个块包含 4 字节(即一个浮点数),那么数组 x 和 y 的元素将映射到相同的缓存组中,导致频繁的冲突不命中。
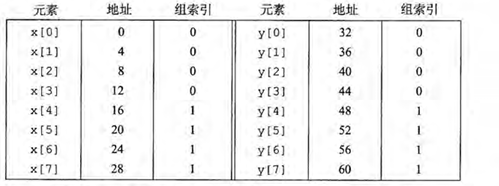
在运行时,访问 x[0] 会将其加载到缓存中。接下来,访问 y[0] 会导致冲突不命中,因为它映射到相同的缓存组,迫使 x[0] 被替换出缓存。这个过程会在每次访问 x[i] 和 y[i] 时重复发生,导致大量的缓存不命中,从而显著降低程序的性能
但我们可以通过强制增大缓存的块大小来缓解这个问题。例如,如果我们将数组大小增加到 12 )
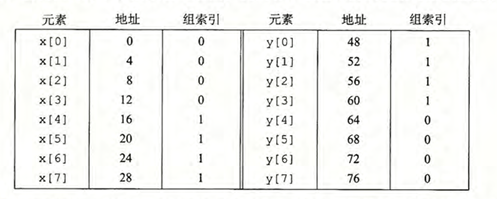
\(x\) 和 \(y\) 映射到不同组,从而避免了冲突不命中,提高了缓存的命中率和程序的性能。
组相连高速缓存
直接映射高速缓存中冲突不命中造成的问题源于每个组只有一行
组相连高速缓存通过允许每个组包含多个行来缓解这个问题,从而减少冲突不命中的发生

组选择
和直接映射缓存类似,组相连缓存使用地址的 \(s\) 位组索引字段来选择高速缓存中的一个组
行匹配和字选择
比直接映射缓存多了一步:在选中的组中查找与地址的标记字段匹配的行。如果找到匹配的行,并且该行的有效位被设置为 1,则表示缓存命中;否则,表示缓存不命中
行替换
当发生缓存不命中时,需要将主存中的数据块加载到缓存中。如果所选组中的所有行都已被占用(即有效位均为 1),则需要选择一个行进行替换。组相连缓存通常使用更复杂的替换策略
最近最少使用(LRU,Least Recently Used)策略,即替换掉在最近一段时间内最少被访问的行
最不常使用(LFU,Least Frequently Used)策略,即替换掉访问频率最低的行
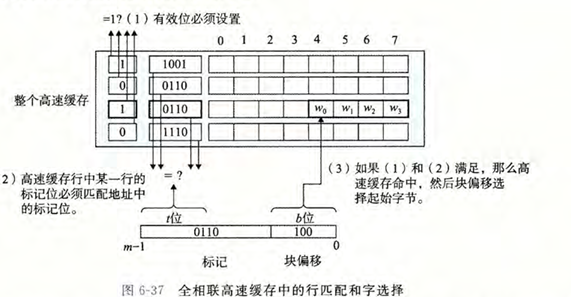
全相连高速缓存
全相连高速缓存是组相连缓存的一个极端情况,其中整个缓存被视为一个单一的组,包含所有的行
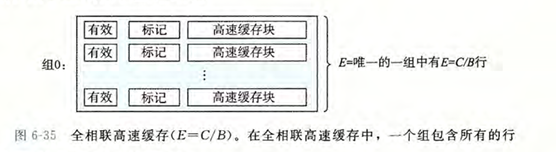
在全相连缓存中,任何主存块都可以存储在缓存的任何行中,这种灵活性极大地减少了冲突不命中的可能性
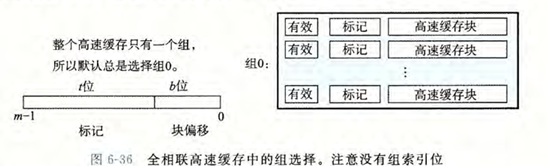
组选择
全相连缓存没有组索引字段,因为整个缓存被视为一个单一的组
行匹配和字选择
在全相连缓存中,行匹配涉及检查缓存中的所有行,以查找与地址的标记字段匹配的行。如果找到匹配的行,并且该行的有效位被设置为 1,则表示缓存命中;否则,表示缓存不命中
有关写的问题
假设我们要写一个已经缓存了的字\(w\),写命中,writehit)
直写法(write-through)
在这种方法中,每当 CPU 写入缓存中的数据时,数据也会立即写入主存。这确保了缓存和主存之间的数据一致性,但可能导致较高的写延迟,因为每次写操作都需要访问较慢的主存。
写回法(write-back)
在这种方法中,当 CPU 写入缓存中的数据时,数据仅更新缓存,而不立即写入主存。只有当缓存行被替换时,才将修改过的数据写回主存。这种方法减少了对主存的写操作,提高了性能,但需要额外的机制来跟踪哪些缓存行已被修改(通常使用一个称为“脏位”的标志位)。
写不命中
当 CPU 尝试写入一个不在缓存中的字时,发生写不命中(write miss)。处理写不命中的方法有两种主要策略:
写分配(write-allocate)
在这种策略中,当发生写不命中时,系统会先将包含目标字的块从主存加载到缓存中,然后再执行写操作。这种方法适用于局部性较好的情况,因为加载整个块可能会使后续的写操作更快。
非写分配(no-write-allocate)
在这种策略中,当发生写不命中时,系统直接将数据写入主存,而不将块加载到缓存中。这种方法适用于局部性较差的情况,因为加载整个块可能不会带来性能提升。
编写高速缓存友好的代码
让最常见的情况运行的快
程序的大部分执行时间通常花在少数核心循环上。应该把优化的重心放在这些“热点”区域(通常是嵌套循环的最内层)。
减少内层循环的计算量,确保内层循环的数据访问具有良好的局部性。
尽量减少每个循环内部的缓存不命中量
利用空间局部性(步长为 1 的访问)和时间局部性(重复使用缓存中的数据)
代码示例与对比
A. 空间局部性:步长 (Stride) 的重要性
假设我们有一个二维数组 a[M][N],在 C 语言中它是按行优先(Row-major)存储的。
推荐:高速缓存友好型(步长为 1)
1 | // 扫描顺序:a[0][0], a[0][1], a[0][2]... |
- 为什么快?:当 CPU 加载
a[0][0]时,它会顺便把后面的一整块数据(例如 64 字节,包含多个int)都加载到缓存行中。访问a[0][1]时,数据已经在缓存里了。
不推荐:高速缓存不友好型(步长为 N)
1 | // 扫描顺序:a[0][0], a[1][0], a[2][0]... |
- 为什么慢?:如果数组很大,每次
i++访问的地址距离上一个地址非常远。上一次加载的缓存行还没被用到就可能被替换掉,导致频繁的 Cache Miss。
B. 时间局部性:变量复用
示例:局部变量的使用
1 | void sum_vec(int v[N], int *res) { |
- 分析:这里
temp展现了极好的时间局部性。在整个循环中,temp被反复引用。相比于每次循环都直接修改指针指向的内容(*res += v[i]),使用局部变量能减少对内存(或高层缓存)的写操作,让“最常见的情况”运行得更快。
家庭作业
6.22
磁道数量与 \((1-x)r\) 成正比,磁道位数和 \(xr\) 成正比,设为
总容量位数为 \(C\),则有:\(C(x)=K(x-x^2)\),最大时\(x=0.5\)。
6.23
平均寻道时间 \(T_1=4ms\)
最大旋转延迟 \(T_m=\frac{60}{15000}=4ms\)
平均旋转延迟 \(T_2=2ms\)
平均传输时间 \(T_3=\frac{1}{15000}\times \frac{1}{800}\times 10^3=0.005ms\)
总时间 \(T=T_1+T_2+T_3=6.005ms\)
6.24
平均寻道时间 \(T_1=4ms\)
最大旋转延迟 \(T_m=\frac{60}{15000}=4ms\)
平均旋转延迟 \(T_2=2ms\)
\(2MB\) 的文件, \(2MB=2^{21}\)字节,扇区大小 \(512\)字节,块数为 \(\frac{2^{21}}{2^9}=2^{12}=4096\)块
最好情况时,一个接一个,读取时间 \(T_3=\frac{4096}{1000}\times T_m==16.384ms\)
总时间 \(22.384ms\)
随机情况时,读取每个块都要先寻道和等待旋转,读取
对于一个块,寻找时间为 \(T_1+T_2+\frac{1}{1000} \times T_m = 6.004ms\)
总时间 \(T=4096\times 6.004ms=24586.384ms\)
6.25
| 高速缓存 | m | C | B | E | S | t | s | b |
|---|---|---|---|---|---|---|---|---|
| 1. | \(32\) | \(1024\) | \(4=2^2\) | \(4=2^2\) | $64 $ | \(24\) | \(6\) | \(2\) |
| 2. | \(32\) | \(1024\) | \(4=2^2\) | \(256=2^8\) | \(1\) | \(30\) | \(0\) | \(2\) |
| 3. | \(32\) | \(1024\) | \(8=2^3\) | \(1\) | \(128\) | \(22\) | \(7\) | \(3\) |
| 4. | \(32\) | \(1024\) | \(8=2^3\) | \(128=2^7\) | \(1\) | \(29\) | \(0\) | \(3\) |
| 5. | \(32\) | \(1024\) | \(32=2^5\) | \(1\) | \(32\) | \(22\) | \(5\) | \(5\) |
| 6. | \(32\) | \(1024\) | \(32=2^5\) | \(4=2^2\) | \(8\) | \(24\) | 32$ | \(5\) |
6.26
| 高速缓存 | m | C | B | E | S | t | s | b |
|---|---|---|---|---|---|---|---|---|
| 1. | \(32\) | \(2048\) | \(8=2^3\) | \(1=2^0\) | \(2^8=256\) | \(21\) | \(8\) | \(3\) |
| 2. | \(32\) | \(2048\) | \(4=2^2\) | \(4\) | \(128=2^7\) | \(23\) | \(7\) | \(2\) |
| 3. | \(32\) | \(1024\) | \(2=2^1\) | $8=2^3 $ | $64=2^6 $ | \(25\) | \(6\) | \(1\) |
| 4. | \(32\) | \(1024\) | \(2^5=32\) | \(2=2^1\) | \(16=2^4\) | \(23\) | \(4\) | \(5\) |
6.27
0b0100 0101 001 00 = 0x08A4
0b0100 0101 001 01 = 0x08A5
0b0100 0101 001 10 = 0x08A6
0b0100 0101 001 11 = 0x08A6
0b0011 1000 001 00 = 0x0704
0b0011 1000 001 01 = 0x0705
0b0011 1000 001 10 = 0x0706
0b0011 1000 001 11 = 0x0707
0b1001 0001 110 00 = 0x1238
0b1001 0001 110 01 = 0x1239
0b1001 0001 110 10 = 0x123A
0b1001 0001 110 11 = 0x123B
6.28
无
0b1100 0111 100 00 = 0x18F0
0b1100 0111 100 01 = 0x18F1
0b1100 0111 100 10 = 0x18F2
0b1100 0111 100 11 = 0x18F3
0b0000 0101 100 00 = 0x00B0
0b0000 0101 100 01 = 0x00B1
0b0000 0101 100 10 = 0x00B2
0b0000 0101 100 11 = 0x00B3
0b0111 0001 101 00 = 0x0E34
0b0111 0001 101 01 = 0x0E35
0b0111 0001 101 10 = 0x0E36
0b0111 0001 101 11 = 0x0E37
0b1101 1110 111 00 = 0x1BDC
0b1101 1110 111 01 = 0x1BDD
0b1101 1110 111 10 = 0x1BDE
0b1101 1110 111 11 = 0x1BDF
6.29
| 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ? | CT | CT | CT | CT | CT | CT | CT | CT | CI | CI | CO | CO |
| 操作 | 地址 | 命中 | 读出的值 |
|---|---|---|---|
| 读 | 0x834 | 未命中 | - |
| 写 | 0x836 | 命中 | 未知 |
| 读 | 0xFFD | 命中 | C0 |
6.30
E=4,B=4,S=8,C=128字节
| 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CT | CT | CT | CT | CT | CT | CT | CT | CI | CI | CI | CO | CO |
6.31
0011 1000 110 10
CO:0x2
CI:0x6
CT:0x38
命中
EB
6.32
1011 0111 010 00
CO:0x0
CI:0x2
CT:0xB7
未命中
6.33
0b 1011 1100 010 00 = 0x1788
0b 1011 1100 010 01 = 0x1789
0b 1011 1100 010 10 = 0x178A
0b 1011 1100 010 11 = 0x178B
0b 1011 0110 010 00 = 0x16C8
0b 1011 0110 010 01 = 0x16C9
0b 1011 0110 010 10 = 0x16CA
0b 1011 0110 010 11 = 0x16CB
6.34
直接映射,E=1,B=16,C=32,S=2
m表示不命中,h表示命中
int4字节,一次可取数组一行
dst
| m | m | m | m |
|---|---|---|---|
| m | m | m | m |
| m | m | m | m |
| m | m | m | m |
src
| m | m | h | m |
|---|---|---|---|
| m | h | m | h |
| m | m | h | m |
| m | h | m | h |
6.35
直接映射,E=1,B=16,C=128,S=8
dst
| m | m | m | m |
|---|---|---|---|
| m | m | m | m |
| m | m | m | m |
| m | m | m | m |
src
| m | h | h | h |
|---|---|---|---|
| m | h | h | h |
| m | h | h | h |
| m | h | h | h |
6.36
C=512,直接映射,E=1,B=16,S=32
块 16 字节,一个块读取 4 个整型
x[2][128],一行512字节
x[0][0] 地址 0x0000-0x0004
x[1][0] 地址 0x0200-0x0204
x[0][0] 映射到组:\((0 / 16) \bmod 32 = \mathbf{0}\)
x[1][0] 映射到组:\((512 / 16) \bmod 32 = 32 \bmod 32 = \mathbf{0}\)
两个元素映射到同一个组,一定会冲突
不命中率 100%
C=1024,直接映射,E=1,B=16,S=64
x[0][0] 映射到组:\((0 / 16) \bmod 64 = 0\)
x[1][0] 映射到组:\((512 / 16) \bmod 64 = 32\)
一个块读取 4 个整型
访问 4 个有 1 个不命中
128/4 = 32,正好到第 32 组,后面不会发生驱逐
不命中率 25%
C=512,E=2,B=16,S=16
x[0][0] 映射到组:\((0 / 16) \bmod 16 = 0\)
x[1][0] 映射到组:\((512 / 16) \bmod 16 = 32 \bmod 16 = 0\)
但是由于是 2 路组相联,可以同时存放两个块
访问 4 个有 1 个不命中
不命中率 25%
更大的高速缓存大小会让S更大,但是会发生冷不命中,只要这两块能同时塞进组里,再大的缓存也不会减少冷不命中的次数
更大的块大小每次取的数据更多,减少了不命中的次数
6.37
C=4KB=4096字节
B=16字节,S=256组
E=1,直接映射
当 N=64 时,
sumA
一次能取出 4 个数据,不命中率 25%
sumB
正好 64 mod 16 = 0,不命中率 100%
sumC
一次取一个方块,每个方块每行的第二个是命中的,不命中率 50%
当 N=60 时,
sumA
同理,不命中率 25%
sumB
两行之间的地址差为
60×4=24060×4=240字节
在 Cache 中相隔 240/16=15240/16=15 个块
步长不再导致 Cache 组冲突,加载的块能长时间保存在 Cache 中
不命中率 25%
sumC
同理,不命中率 25%
6.38
C=2048
直接映射,E=1
B=32,S=64
结构体4个整型占 16 字节
每次预取占 2 个结构体
写总数 \(16*16*4=1028\)
高速缓存中不命中 1/8 ,共 128 次
不命中率 12.5%
6.39
变为列优先了,由于每行 16*16=256 字节,块大小 32 字节
\(256/32 mod 64= 8\),每 \(8\) 个会冲突一次
不命中率提高到 25%
写总数不变,1028
不命中 256
不命中率 25%
6.40
先循环一个变量,其他不改,第二次正好冲突,重新读,提高一倍
写总数不变
不命中 256
不命中率 25%
6.41
C=64KB=65536字节
总计480 × 640 = 307,200次写缓存大小65,536字节,能存16,384行
不命中率是25%
因此写不命中次数是72800次
6.42
25%
6.43
100%